Mamoru Mitsuishi, Professor Mamoru Mitsuishi, Professor
Department of Engineering Synthesis
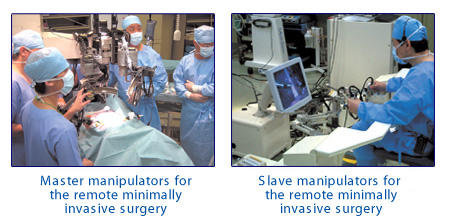
"Remote medical systems" provide an environment where a medical doctor at a remote location can diagnose and operate on a patient. There are several kinds of remote medical systems, such as tele-pathology, tele-mentoring, tele-surgery and tele-education systems. These technologies reduce the stress on and workload of both the patient and doctor and allow for consultations between local and remote medical professionals, emergency care workers, home care specialists, and high-level medical educators. In our group, as an example of remote surgery, a remote, minimally invasive surgical system has been developed. Multi-axis force sensors are installed at the master manipulators for the left and right hands. The force detected at the slave manipulators can be fed back to the master manipulator. The viewing direction of the endoscope, which is supported by a slave manipulator, can be controlled from the master manipulator by switching the mode using a foot pedal. The slave manipulator has three arms. The left and right hands hold the forceps and the center arm holds the endoscope. All arms are designed so that the insertion point for the trocar is mechanically fixed in space. A cholecystectomy for a pig has been successfully executed 4 times between Tokyo and Fujinomiya by our group. The time delay was 390 ms and 50 ms, for visual and auditory information transmission (1.5 Mbps) and control information transmission (256 kbps), respectively. Our group is also developing a micro-neurosurgical system in the deep surgical field, a bone cutting robot for total knee arthroplasty, a robot to assist femur fracture reduction, a remote ultrasound diagnosis system, a hand surgery system and a tele-micro-surgical system. |